超維計算讓AI有記憶和反應(yīng),還能解決自動駕駛難題
馬里蘭大學(xué)的一個研究團隊最近提出了超維計算理論(hyperdimensional computing theory),能夠讓機器人擁有記憶和反應(yīng)。這可以打破我們與自動駕駛汽車和其他機器人之間的僵局,這也將促使更像人類AI模型的出現(xiàn)。
馬里蘭州團隊提出了一種理論方法——超維計算,一種超線程的替代方式,基于布爾值和數(shù)字計算,可以取代當(dāng)前用于處理感官信息的深度學(xué)習(xí)方法。
根據(jù)團隊成員之一也是論文作者的博士生Anton Mitrokhin的說法,這很重要,因為要讓AI像人類一樣面臨著處理的瓶頸:
基于神經(jīng)網(wǎng)絡(luò)的AI方法既龐大又緩慢,因為這種方法無法記憶。我們的超維理論方法可以產(chǎn)生記憶,這將大幅減少計算需求,并且使任務(wù)可以更快和更有效地完成。
記憶是當(dāng)前人工智能所不具備的,但這對于預(yù)測未來的任務(wù)非常重要。想象一下,在打網(wǎng)球的時候,每次擊球時你都不在頭腦中計算,而只是跑過來,然后打它。你感知到球并采取行動,沒有借助其他東西將真實世界的數(shù)據(jù)轉(zhuǎn)化為數(shù)字?jǐn)?shù)據(jù)然后進行處理。這種在沒有過濾器的情況下將感知轉(zhuǎn)化為行動的能力是人類在現(xiàn)實世界中固有的能力。
2016年5月,特斯拉汽車在開啟自動駕駛輔助系統(tǒng)的情況下,未能“看到”卡車的白色拖車,特斯拉汽車以高速公路的速度撞向它。最近又發(fā)生了同樣的事情。不同型號特斯拉汽車,不同版本的自動駕駛系統(tǒng),但結(jié)果是同樣的,這是為什么?
雖然埃隆馬斯克應(yīng)該承擔(dān)一些責(zé)任,人為錯誤也需要對此負責(zé),但事實仍然是深度學(xué)習(xí)會讓自動駕駛汽車變得糟糕,并且沒有太大的希望讓它會變得更好。
其原因很復(fù)雜,但可以很容易地解釋。AI不知道汽車、人、拖車或熱狗的樣子。很容易發(fā)現(xiàn),一個深學(xué)習(xí)型AI模型可以通過一百萬張的圖片進行訓(xùn)練讓這個模型對熱狗圖片識別的精確度達到99.9%,但它永遠不會知道真正看起來像是什么樣。
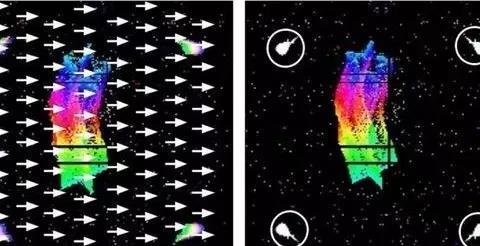
超維計算理論為AI提供了真正“看到”世界并做出自己推論的能力。通過對每個可感知的對象和變量進行數(shù)學(xué)運算,超矢量可以在機器人中實現(xiàn)“主動感知”,而不是試圖通過強制處理整個宇宙。
據(jù)論文的主要作者 Yiannis Aloimonos所說:
主動感知者知道為什么要感知,然后選擇要感知的內(nèi)容,并確定感知的方式,包括何時以及在何處實現(xiàn)感知。它選擇并專注于場景、時刻和情節(jié)。然后,它將其機制,傳感器和其他組件,以根據(jù)它想要查看的內(nèi)容進行操作,并選擇最佳捕獲其意圖的視點。我們的超維框架可以解決每個問題。
雖然機器人的超維計算操作系統(tǒng)的創(chuàng)建和實現(xiàn)仍然是理論上的,但這些想法為研究提供了一條前進的道路,可以為無人駕駛汽車AI提供解決當(dāng)前需要解決問題的方法。
此外,這個理論不僅僅是機器人技術(shù)。研究人員的最終目標(biāo)是用更快、更有效的基于超維計算的替換神經(jīng)網(wǎng)絡(luò)模型取代迭代神經(jīng)網(wǎng)絡(luò)模型。這可能會導(dǎo)致一種沒有進展的線下,它接近于開發(fā)新的機器學(xué)習(xí)模型。
我們可能更接近于實現(xiàn)一個能夠在不熟悉的環(huán)境中學(xué)習(xí)執(zhí)行新任務(wù)的機器人 - 比如“Jetsons”中的Rosie The Robot - 比大多數(shù)專家都認為的更好。當(dāng)然,像這樣的技術(shù)也可能帶來其他問題......不那么卡通化的產(chǎn)品。
雷鋒網(wǎng)編譯,via thenextweb
來源 | 雷鋒網(wǎng)